User Guide#
This user guide shows you different examples of how to use decent-bench.
Installation#
Requires Python 3.13+
pip install decent-bench
Sunny case#
Benchmark algorithms on a regression problem without any communication constraints, using only default settings.
Generally benchmark execution involves three steps:
Run algorithms on a
BenchmarkProblemobject and get results in aBenchmarkResultobject.Compute metrics from the benchmark results, which returns a
MetricResultobject.Display the computed metrics in tables and plots.
- Note:
When running benchmarks, be sure to guard the execution code with
if __name__ == "__main__":to avoid issues with multiprocessing on some platforms (e.g., Windows). This is a common Python practice to ensure that the benchmark code only runs when the script is executed directly, and not when it is imported as a module or when worker processes are spawned for multiprocessing. If you forget to include this guard and you are using multiprocessing, i.e. withmax_processes > 1inbenchmark(), you may encounter errors or unexpected behavior due to the way multiprocessing works on different platforms.
The following is a working example. The remainder of the user guide will be updated soon.
from decent_bench.agents import Agent
from decent_bench import benchmark
from decent_bench.metrics import runtime_library
from decent_bench.utils.checkpoint_manager import CheckpointManager
from decent_bench.distributed_algorithms import DGD, ATC
from decent_bench.networks import P2PNetwork
from decent_bench.benchmark import create_quadratic_problem
import networkx as nx
if __name__ == "__main__":
## problem definition
n_agents = 10
costs, x_optimal = create_quadratic_problem(10, n_agents)
agents = [Agent(cost) for i, cost in enumerate(costs)]
graph = nx.complete_graph(n_agents)
net = P2PNetwork(
graph=graph,
agents=agents,
)
bp = benchmark.BenchmarkProblem(net, x_optimal)
## benchmarking
cm = CheckpointManager(checkpoint_dir="results/benchmark_1", checkpoint_step=100, keep_n_checkpoints=2)
num_iter = 1000
step = 0.001
res = benchmark.benchmark(algorithms=[
DGD(iterations=num_iter, step_size=step),
ATC(iterations=num_iter, step_size=step),
],
benchmark_problem=bp,
checkpoint_manager=cm,
n_trials=1,
)
metr = benchmark.compute_metrics(res, checkpoint_manager=cm)
benchmark.display_metrics(metr, checkpoint_manager=cm)
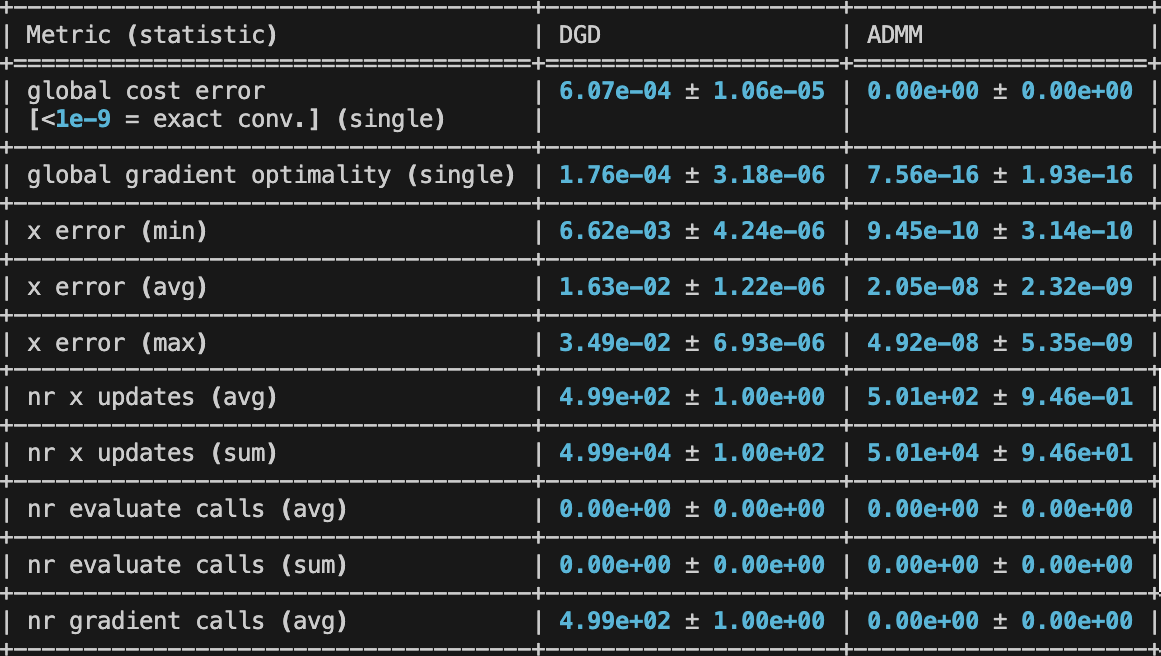
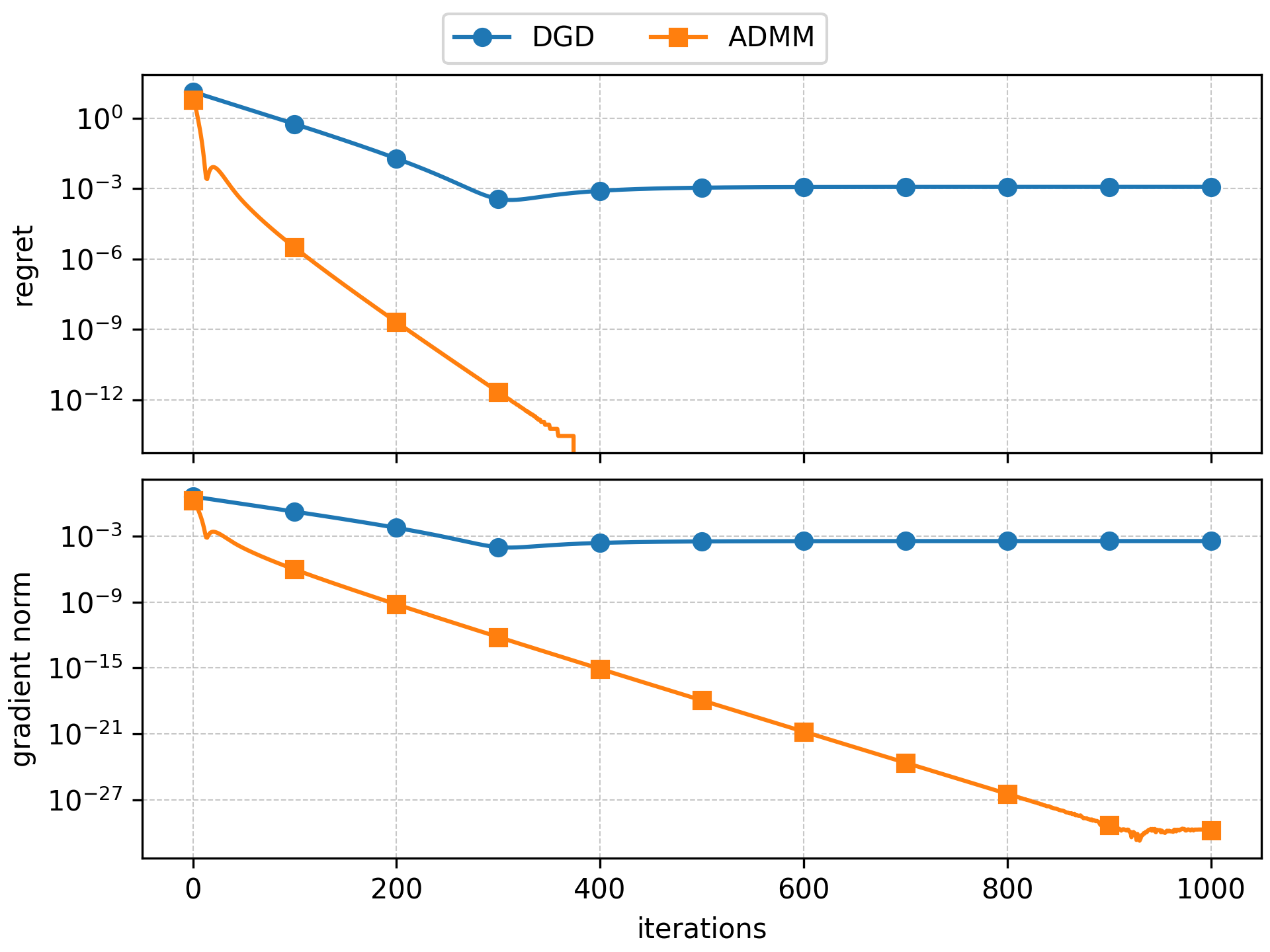
Benchmark executions will have outputs like these:
|
|
The user guide from here on is outdated; it will be updated soon.
Available algorithms#
Note: algorithms are slightly modified with respect to the corresponding papers to ensure that they work in a broader range of conditions (asynchorny/partial participation, loss of communications, etc) than the original papers.
Peer-to-peer#
ADMM [
dual method,ADMM]ATG [
gradient-tracking,dual method,ADMM]ATC [
gradient-based]ATC_Tracking [
gradient-tracking]AugDGM [
gradient-tracking]DGD [
gradient-based]DLM [
ADMM,gradient-based]DiNNO [
gradient-based]ED [
gradient-tracking]EXTRA [
gradient-tracking]GT_SAGA [
gradient-tracking]GT_SARAH [
gradient-tracking]GT_VR [
gradient-tracking]KGT [
gradient-based]LED [
gradient-based]LT_ADMM [
gradient-based,dual method,ADMM]LT_ADMM_VR [
gradient-based,dual method,ADMM,variance-reduction]NIDS [
gradient-tracking]ProxSkip [
gradient-based]SimpleGT [
gradient-tracking]WangElia [
gradient-tracking]
Federated#
FedAvg performs local client
gradient steps from the broadcast server model and then replaces the server
model with the uniform average of the received final client models.
FedProx extends
FedAvg with a proximal coefficient
penalty. In the FedProx equations, the symbol \(\mu\) is used for this
coefficient, and the corresponding argument is penalty. Setting
penalty=0 reduces FedProx
to FedAvg.
FedAdagrad,
FedYogi, and
FedAdam form the built-in
FedOpt family. They keep the same
client-side local SGD structure as
FedAvg, but each client uploads its
model delta to the server and the server applies an adaptive optimizer update
instead of plain averaging to the next global iterate.
FedNova supports the plain
Local-SGD FedNova update together with optional local momentum, proximal local
updates, and server momentum. Clients accumulate their local updates together
with the FedNova normalization coefficient and upload them to the server in
two separate transmissions before the server applies the aggregated update.
If none of the first-phase normalizer uploads are received in a round, that round is skipped without updating the server model.
The num_local_steps argument can be either a single integer for
homogeneous local work or a per-client mapping for heterogeneous local step
counts.
FedLT implements Federated Local
Training with cost-driven local gradients. Its local_solver option supports
"gd", "nesterov", and "adam" local updates. Solver-specific
hyperparameters are passed through solver_args. If solver_args is omitted
or left empty, solver-specific defaults are used: "nesterov" uses momentum=0.9,
"adam" uses beta1=0.9, beta2=0.999, and epsilon=1e-8, and "gd" uses no additional solver arguments.
EmpiricalRiskCost objects use their default
mini-batch gradient behavior, so gradient-based local solvers use mini-batches,
while generic Cost objects use full gradients.
Fed-LT compression and Fed-PLT-style noisy-message experiments are configured
through FedNetwork
message_compression and message_noise schemes rather than algorithm
arguments.
SCAFFOLD implements
stochastic controlled averaging with a server control variate and one client
control variate per client. Selected clients run local steps corrected by the
difference between the server and client control variates, then upload both
their model delta and control-variate delta. The server applies the averaged
model delta with server_step_size and updates its control variate using the
participation fraction.
FedPD implements the FedPD
primal-dual update. Clients keep persistent local primal variables, dual
variables, and centre candidates. Each round uses num_local_steps local
gradient steps on the augmented Lagrangian, with step_size controlling the
local learning rate and penalty controlling the FedPD quadratic
penalty/dual-update parameter. The skip_probability argument controls the
paper’s optional communication skipping: 0 aggregates every round and 1
always keeps local centre candidates without server aggregation. Like
FedNova, num_local_steps can be either a single integer or a per-client
mapping. FedPD always uses all active clients; partial participation is not
supported.
FedDyn implements Federated Dynamic
Regularization. Clients keep a persistent dynamic state g and the server
keeps an auxiliary vector h. Selected clients run num_local_steps local
gradient steps on the dynamic-regularized local objective using step_size as
the local learning rate and penalty as the regularization coefficient. In
the FedDyn equations, the symbol \(\alpha\) denotes this regularization,
and the corresponding argument is penalty.
Federated aggregation#
For the built-in federated algorithms, aggregation affects only how client updates are combined at the server. It does not change the optimization objective itself. If you want to optimize a weighted objective, scale the client costs in the problem definition instead of relying on aggregation.
FedAvg and
FedProx use uniform averaging
over the selected clients.
FedAdagrad,
FedYogi, and
FedAdam also average client
model deltas uniformly over the selected clients before applying their
server-side adaptive optimizer.
FedNova uses data-proportional
client weights over the received uploads in the round, and it does not average
final client models directly when local step counts differ. Instead, it
aggregates the client cumulative SGD updates using the FedNova rescaling factor
and applies the resulting descent step at the server. With the default flags,
this is the plain no-momentum FedNova variant. Enabling use_momentum,
use_prox, or use_server_momentum extends the local and server updates
to the corresponding FedNova variants controlled by momentum, penalty,
and server_momentum. In the FedNova equations, symbols \(\beta\),
\(\mu\), and \(\gamma\) map to those arguments respectively. Plain
FedNova matches
FedAvg only when the participating
clients use the same number of local steps and
FedNova and
FedAvg both use data-proportional
aggregation weights.
FedPD aggregates received centre
candidates uniformly when communication is not skipped.
FedDyn averages the received
selected-client models uniformly, so the local-model average is scaled by the
number of received selected clients. The next server model also includes the
FedDyn dynamic correction from the server auxiliary vector h. The h
update uses only received client models and scales their model deltas by the
total number of clients.
Scaffold matches the standard
SCAFFOLD algorithm and always uses uniform averaging over the selected clients.
Client selection#
Federated algorithms accept a selection_scheme argument. The scheme receives
the active clients for the current round and returns the subset that should
receive the server broadcast.
UniformSelection samples active clients
uniformly without replacement. This is the default for the built-in federated
algorithms.
DataSizeSelection samples active clients
without replacement with probabilities proportional to client data size. This is
useful when local dataset sizes are imbalanced and you want larger clients to
have more participation opportunities. The scheme reads data size from
EmpiricalRiskCost.n_samples, so it requires clients to use empirical-risk
costs.
FairSelection prioritizes
clients with fewer past selections. This is useful when availability or random
sampling can repeatedly skip some clients and you want selection opportunities
to remain balanced across rounds.
HighLossSelection evaluates client losses
at each client’s current x and selects the clients with highest loss.
from decent_bench.algorithms.federated import FedAvg
from decent_bench.schemes import DataSizeSelection
algorithm = FedAvg(
iterations=100,
step_size=0.01,
selection_scheme=DataSizeSelection(fraction_selected_clients=0.1),
)
Available costs#
Regression#
LinearRegressionCost [
empirical-risk]PyTorchCost [
classification,empirical-risk]
Classification#
LogisticRegressionCost [
empirical-risk]PyTorchCost [
regression,empirical-risk]
PyTorchCost regularization#
When combining PyTorchCost with one of the
built-in regularizers, instantiate the regularizer with the same framework
and device as the empirical cost:
from decent_bench.costs import L2RegularizerCost
from decent_bench.utils.types import SupportedFrameworks
reg = L2RegularizerCost(
shape=cost.shape,
framework=SupportedFrameworks.PYTORCH,
device=cost.device,
)
objective = cost + reg
This preserves compatibility with the PyTorch empirical objective and keeps the resulting objective in the empirical, batch-compatible abstraction. It is convenient for composition, but it is not necessarily the most efficient option compared with native framework-specific regularization.
Execution settings#
Configure settings for metrics, trials, logging, and multiprocessing.
from logging import DEBUG
import numpy as np
from decent_bench.metrics import utils
from decent_bench import benchmark
from decent_bench.costs import LinearRegressionCost
from decent_bench.distributed_algorithms import ADMM, DGD
from decent_bench.metrics import ComputationalCost
from decent_bench.metrics.metric_library import GradientCalls, Regret
from decent_bench.metrics.runtime_library import RuntimeLoss, RuntimeRegret
if __name__ == "__main__":
regret = Regret(x_log=False, y_log=True)
gradient_calls = GradientCalls([min, np.average, max, sum])
benchmark_result = benchmark.benchmark(
algorithms=[DGD(iterations=1000, step_size=0.01), ADMM(iterations=1000, penalty=10, relaxation=0.3)],
benchmark_problem=benchmark.create_regression_problem(LinearRegressionCost),
n_trials=10,
max_processes=1,
progress_step=200,
show_speed=True,
log_level=DEBUG,
runtime_metrics=[
RuntimeLoss(update_interval=100, save_path="results"), # Runtime plots are saved to "results" directory after execution
RuntimeRegret(update_interval=100, save_path="results"),
],
)
metrics_result = benchmark.compute_metrics(
benchmark_result,
table_metrics=[regret, gradient_calls],
plot_metrics=[regret],
log_level=DEBUG,
)
benchmark.display_metrics(
metrics_result,
table_metrics=[gradient_calls], # Can modify which metrics are displayed, cannot add new metrics that were not computed
plot_metrics=[], # Disable plot metrics to only show tables
table_fmt="latex",
plot_grid=False,
individual_plots=False,
computational_cost=ComputationalCost(proximal=2.0, communication=0.1),
compare_iterations_and_computational_cost=True,
save_path="results", # Save tables and plots to the "results" directory
)
For plot metrics some special options are available which change how they are displayed.
If you set individual_plots = True then each plot metric will be displayed in its own separate figure,
otherwise groups of up to 3 plot metrics will be displayed together in the same figure as subplots.
If you set compare_iterations_and_computational_cost = True, then an additional column of subplots will be added to each figure comparing iterations and computational cost,
which can be useful to understand the trade-off between faster convergence and higher computational cost for different algorithms.
Interpreting Metric Warnings#
Warnings during metric computation and display are expected in some scenarios, especially when algorithms diverge or when metric prerequisites are not provided.
Plot truncation warnings#
Plot metric trajectories are truncated at the first non-finite datapoint (NaN/inf) or first datapoint above the internal plotting threshold used for log-scale stability.
Typical messages include:
Truncating plot computation ... retained K point(s) from M/N trial(s).Skipping plot computation ... all trials diverged before the first plottable datapoint.
These warnings indicate that divergence was detected and handled gracefully for plotting.
Why tables can show NaN while plots still appear#
Tables and plots summarize different parts of the trajectory:
Table metrics typically use the final iteration.
Plot metrics may retain and display an earlier finite prefix.
So it is expected to see nan ± nan in a table for a metric while still seeing a corresponding curve in the plot.
Benchmark problems#
Configure out-of-the-box regression problems#
Configure communication constraints and other settings for out-of-the-box regression problems.
The agent_state_snapshot_period parameter controls how often metrics are recorded.
Setting it to a value greater than 1 (the default) can help reduce overhead for long-running algorithms while still providing enough data points for analysis.
This also speeds up metric calulation and plotting, which can be significant for large benchmarks with many iterations and agents.
from decent_bench import benchmark
from decent_bench.costs import LinearRegressionCost
from decent_bench.distributed_algorithms import ADMM, DGD, ED
problem = benchmark.create_regression_problem(
LinearRegressionCost,
n_agents=100,
agent_state_snapshot_period=10, # Record metrics every 10 iterations
n_neighbors_per_agent=3,
asynchrony=True,
compression=True,
noise=True,
drops=True,
)
if __name__ == "__main__":
benchmark_result = benchmark.benchmark(
algorithms=[
DGD(iterations=1000, step_size=0.01),
ED(iterations=1000, step_size=0.01),
ADMM(iterations=1000, penalty=10, relaxation=0.3),
],
benchmark_problem=problem,
)
metrics_result = benchmark.compute_metrics(benchmark_result)
benchmark.display_metrics(metrics_result)
Modify existing problems#
Change the settings of an already created benchmark problem, for example, the network topology.
import networkx as nx
from decent_bench import benchmark
from decent_bench.costs import LinearRegressionCost
from decent_bench.distributed_algorithms import ADMM, DGD, ED
n_agents = 100
n_neighbors_per_agent = 3
problem = benchmark.create_regression_problem(
LinearRegressionCost,
n_agents=n_agents,
n_neighbors_per_agent=n_neighbors_per_agent,
asynchrony=True,
compression=True,
noise=True,
drops=True,
)
problem.network_structure = nx.random_regular_graph(n_agents, n_neighbors_per_agent)
if __name__ == "__main__":
benchmark_result = benchmark.benchmark(
algorithms=[
DGD(iterations=1000, step_size=0.01),
ED(iterations=1000, step_size=0.01),
ADMM(iterations=1000, penalty=10, relaxation=0.3),
],
benchmark_problem=problem,
)
metrics_result = benchmark.compute_metrics(benchmark_result)
benchmark.display_metrics(metrics_result)
Create problems using existing resources#
Create a custom benchmark problem using existing resources.
import networkx as nx
from decent_bench import benchmark
from decent_bench import centralized_algorithms as ca
from decent_bench.benchmark import BenchmarkProblem
from decent_bench.costs import LogisticRegressionCost
from decent_bench.datasets import SyntheticClassificationData
from decent_bench.distributed_algorithms import ADMM, DGD, ED
from decent_bench.schemes import GaussianNoise, Quantization, UniformActivationRate, UniformDropRate
from decent_bench.utils.types import SupportedFrameworks
from decent_bench.utils.types import SupportedFrameworks
n_agents = 100
dataset = SyntheticClassificationData(
n_classes=2,
n_partitions=n_agents,
n_samples_per_partition=10,
n_features=3,
framework=SupportedFrameworks.NUMPY,
)
costs = [LogisticRegressionCost(*p) for p in dataset.training_partitions()]
sum_cost = sum(costs[1:], start=costs[0])
x_optimal = ca.accelerated_gradient_descent(
sum_cost, x0=None, max_iter=50000, stop_tol=1e-100, max_tol=1e-16
)
problem = BenchmarkProblem(
network_structure=nx.random_regular_graph(3, n_agents, seed=0),
costs=costs,
x_optimal=x_optimal,
agent_activations=[UniformActivationRate(0.5)] * n_agents,
message_compression=Quantization(quantization_step=0.01),
message_noise=GaussianNoise(mean=0, std=0.001),
message_drop=UniformDropRate(drop_rate=0.5),
)
if __name__ == "__main__":
benchmark_result = benchmark.benchmark(
algorithms=[
DGD(iterations=1000, step_size=0.01),
ED(iterations=1000, step_size=0.01),
ADMM(iterations=1000, penalty=10, relaxation=0.3),
],
benchmark_problem=problem,
)
metrics_result = benchmark.compute_metrics(benchmark_result)
benchmark.display_metrics(metrics_result)
Network constraints#
Networks can model constrained communication through activation, compression,
noise, and message-drop schemes. These schemes are configured when creating a
network or benchmark problem and are applied automatically during
send().
Activation schemes control whether an agent is available at a given iteration.
The built-in options are AlwaysActive,
UniformActivationRate,
MarkovChainActivation, and
PoissonActivation.
CyclicActivation alternates between active and
inactive intervals, with an optional phase offset to model staggered recurring
availability windows.
Implemented federated algorithms in decent-bench first ask the network for
active clients and then apply the client-selection scheme to that active set.
Compression schemes transform messages before they are sent. The default
NoCompression leaves messages unchanged.
Quantization rounds message entries to a fixed
number of significant digits. TopK and
RandK keep only a subset of coordinates and set
the rest to zero. StochasticQuantization
implements stochastic norm-scaled quantization used in QSGD.
Noise schemes perturb delivered messages. The default
NoNoise leaves messages unchanged, while
GaussianNoise adds independent Gaussian noise to
each message entry.
Drop schemes decide whether a message is lost before delivery. The default
NoDrops delivers every message.
UniformDropRate drops messages independently
with fixed probability, and GilbertElliott
models bursty drops with a two-state channel.
Message schemes can be provided as one shared instance or as a dictionary mapping each sender agent to its own scheme. Use one instance per sender for stateful schemes, since sharing a stateful scheme shares its internal state across all senders.
from decent_bench.schemes import (
GaussianNoise,
StochasticQuantization,
UniformActivationRate,
UniformDropRate,
)
problem = BenchmarkProblem(
network_structure=network_structure,
costs=costs,
x_optimal=x_optimal,
agent_activations=[UniformActivationRate(0.8) for _ in costs],
message_compression=StochasticQuantization(n_levels=8),
message_noise=GaussianNoise(mean=0, std=0.001),
message_drop=UniformDropRate(drop_rate=0.1),
)
Create problems from scratch#
Create a custom benchmark problem with your own dataset, cost function, and communication schemes by implementing the corresponding abstracts.
import networkx as nx
from decent_bench import benchmark
from decent_bench import centralized_algorithms as ca
from decent_bench.benchmark import BenchmarkProblem
from decent_bench.costs import Cost
from decent_bench.datasets import DatasetHandler
from decent_bench.distributed_algorithms import DGD, SimpleGT
from decent_bench.schemes import AgentActivationScheme, CompressionScheme, DropScheme, NoiseScheme
class MyDataset(DatasetHandler): ... # Optional but convienient to manage partitions
class MyCost(Cost): ...
class MyAgentActivationScheme(AgentActivationScheme): ...
class MyCompressionScheme(CompressionScheme): ...
class MyNoiseScheme(NoiseScheme): ...
class MyDropScheme(DropScheme): ...
n_agents = 100
costs = [MyCost(*p) for p in MyDataset().training_partitions()]
sum_cost = sum(costs[1:], start=costs[0])
x_optimal = ca.accelerated_gradient_descent(
sum_cost, x0=None, max_iter=50000, stop_tol=1e-100, max_tol=1e-16
)
problem = BenchmarkProblem(
network_structure=nx.random_regular_graph(3, n_agents, seed=0),
costs=costs,
x_optimal=x_optimal,
agent_activations=[MyAgentActivationScheme()] * n_agents,
message_compression=MyCompressionScheme(),
message_noise=MyNoiseScheme(),
message_drop=MyDropScheme(),
)
if __name__ == "__main__":
benchmark_result = benchmark.benchmark(
algorithms=[DGD(iterations=1000, step_size=0.01), SimpleGT(iterations=1000, step_size=0.01)],
benchmark_problem=problem,
)
metrics_result = benchmark.compute_metrics(benchmark_result)
benchmark.display_metrics(metrics_result)
Network utilities#
Plot a network explicitly when you need it:
import networkx as nx
from decent_bench import benchmark
from decent_bench.utils import network_utils
from decent_bench.costs import LinearRegressionCost
problem = benchmark.create_regression_problem(LinearRegressionCost, n_agents=25, n_neighbors_per_agent=3)
# Plot using decent-bench helper (wraps :func:`networkx.drawing.nx_pylab.draw_networkx`)
network_utils.plot_network(problem.network_structure, layout="circular", with_labels=True)
# Or call NetworkX directly on the graph
pos = nx.drawing.layout.spring_layout(problem.network_structure)
nx.drawing.nx_pylab.draw_networkx(problem.network_structure, pos=pos, with_labels=True)
For more options, see the NetworkX drawing guide.
Storing results and checkpointing#
By default, benchmark progress and results (plots and tables) are only displayed but not saved to disk. To save results and enable resumption of interrupted benchmarks, use the checkpoint functionality.
Basic checkpointing#
Enable checkpointing by providing a CheckpointManager instance. This automatically saves:
Progress checkpoints allowing benchmark resumption if interrupted
Metric computation results to
{checkpoint_dir}/metric_computation.pklPlots to
{checkpoint_dir}/results/plots_figX.pngTables to
{checkpoint_dir}/results/table.txtand{checkpoint_dir}/results/table.tex
where 3. and 4. are true if save_path is set to the checkpoint manager’s results path in display_metrics().
from decent_bench import benchmark
from decent_bench.costs import LinearRegressionCost
from decent_bench.distributed_algorithms import ADMM, DGD
from decent_bench.metrics.runtime_library import RuntimeLoss, RuntimeRegret
from decent_bench.utils.checkpoint_manager import CheckpointManager
if __name__ == "__main__":
checkpoint_manager = CheckpointManager(checkpoint_dir="benchmark_results/my_experiment")
# Saves step 1.
benchmark_result = benchmark.benchmark(
algorithms=[
DGD(iterations=10000, step_size=0.001),
ADMM(iterations=10000, penalty=10, relaxation=0.3),
],
benchmark_problem=benchmark.create_regression_problem(LinearRegressionCost),
checkpoint_manager=checkpoint_manager,
runtime_metrics=[
RuntimeLoss(update_interval=100, save_path=checkpoint_manager.get_results_path()),
RuntimeRegret(update_interval=100, save_path=checkpoint_manager.get_results_path()),
],
)
# Saves step 2.
metrics_result = benchmark.compute_metrics(benchmark_result, checkpoint_manager)
# Save step 3. and 4. if save_path is set to checkpoint_manager.get_results_path(), can be any other path as well.
benchmark.display_metrics(
metrics_result,
save_path=checkpoint_manager.get_results_path(),
)
The checkpoint directory structure:
benchmark_results/my_experiment/
├── metadata.json # Run configuration and algorithm metadata
├── benchmark_problem.pkl # Initial benchmark problem state (before any trials)
├── initial_algorithms.pkl # Initial algorithm states (before any trials)
├── metric_computation.pkl # Computed metrics results (after all trials complete)
├── algorithm_0/ # Directory for first algorithm
│ ├── trial_0/ # Directory for trial 0
│ │ ├── checkpoint_0000100.pkl # Combined algorithm+network state at iteration 100
│ │ ├── checkpoint_0000200.pkl # Combined algorithm+network state at iteration 200
│ │ ├── progress.json # {"last_completed_iteration": N}
│ │ └── complete.json # Marker file, contains path to final checkpoint
│ ├── trial_1/
│ │ └── ...
│ └── trial_N/
│ └── ...
└── results/ # Results directory for storing final tables and plots after completion
├── plots_fig1.png # Final plot for figure 1 with plot results
├── plots_fig2.png # Final plot for figure 2 with plot results
├── table.tex # Final LaTeX file with table results
└── table.txt # Final text file with table results
Checkpoint parameters#
Control checkpoint behavior with these parameters:
checkpoint_dir: Directory path to save checkpoints. Must be empty or non-existent when starting a new benchmark.
checkpoint_step: Number of iterations between checkpoints within each trial. If
None, only saves at trial completion. For long-running algorithms, use a value like 1000 to checkpoint during execution.keep_n_checkpoints: Maximum number of iteration checkpoints to keep per trial. Older checkpoints are automatically deleted to save disk space. Default is 3.
benchmark_metadata: Optional dictionary to store custom metadata about the benchmark run (e.g., descriptions, system info, notes). This is saved in
metadata.jsonand can be used for tracking and analysis.
import platform
from decent_bench import benchmark
from decent_bench.costs import LinearRegressionCost
from decent_bench.distributed_algorithms import DGD
from decent_bench.utils.checkpoint_manager import CheckpointManager
if __name__ == "__main__":
benchmark.benchmark(
algorithms=[DGD(iterations=50000, step_size=0.001)],
benchmark_problem=benchmark.create_regression_problem(LinearRegressionCost),
checkpoint_manager=CheckpointManager(
checkpoint_dir="benchmark_results/long_run",
checkpoint_step=5000, # Checkpoint every 5000 iterations
keep_n_checkpoints=5, # Keep 5 most recent checkpoints
benchmark_metadata={
"description": "Testing DGD step size sensitivity",
"system": platform.system(),
"python_version": platform.python_version(),
"notes": "Baseline run for paper experiments",
},
),
)
Resuming benchmarks#
If a benchmark is interrupted, resume from the most recent checkpoint:
from decent_bench import benchmark
from decent_bench.utils.checkpoint_manager import CheckpointManager
if __name__ == "__main__":
benchmark_result = benchmark.resume_benchmark(
checkpoint_dir=CheckpointManager(checkpoint_dir="benchmark_results/my_experiment"),
create_backup=True, # Creates a backup zip before resuming
)
Extend an existing benchmark with more iterations or trials:
from decent_bench import benchmark
from decent_bench.utils.checkpoint_manager import CheckpointManager
if __name__ == "__main__":
benchmark_result = benchmark.resume_benchmark(
checkpoint_dir=CheckpointManager(checkpoint_dir="benchmark_results/my_experiment"),
increase_iterations=5000, # Run 5000 additional iterations
increase_trials=10, # Run 10 additional trials
create_backup=True,
)
The optional parameters checkpoint_step and keep_n_checkpoints in CheckpointManager
can be changed when resuming to control how frequently checkpoints are saved and how many are kept, allowing you to manage disk space for long-running benchmarks.
Saving metric computations#
By default, computed metrics are not saved unless a CheckpointManager is provided.
If provided, computed metrics are saved to {checkpoint_dir}/metric_computation.pkl after all trials complete.
This allows you to preserve the results of expensive metric computations for later analysis without needing to recompute them.
This is useful when you want to modify plot settings, table formatting or ComputationalCost values after the benchmark has completed, without needing to rerun the entire benchmark or metric computation.
from decent_bench import benchmark
from decent_bench.costs import LinearRegressionCost
from decent_bench.distributed_algorithms import DGD
from decent_bench.utils.checkpoint_manager import CheckpointManager
import platform
if __name__ == "__main__":
checkpoint_manager = CheckpointManager(checkpoint_dir="benchmark_results/my_experiment")
benchmark_result = benchmark.benchmark(
algorithms=[DGD(iterations=1000, step_size=0.001)],
benchmark_problem=benchmark.create_regression_problem(LinearRegressionCost),
checkpoint_manager=checkpoint_manager,
)
metrics_result = benchmark.compute_metrics(benchmark_result, checkpoint_manager)
Loading BenchmarkResult for metric computations#
Furthermore, the checkpoint manager can be used to load previous benchmark results by setting benchmark_result to None in compute_metrics(),
making sure that the checkpoint manager is pointing to at least a partially completed benchmark.
This allows you to compute new metrics from previously completed benchmarks or to modify existing metrics without needing to rerun the entire benchmark.
The new metrics will be saved to the checkpoint directory as described above.
from decent_bench import benchmark
from decent_bench.utils.checkpoint_manager import CheckpointManager
if __name__ == "__main__":
checkpoint_manager = CheckpointManager(checkpoint_dir="benchmark_results/my_experiment")
metrics_result = benchmark.compute_metrics(
benchmark_result=None,
checkpoint_manager=checkpoint_manager
)
Loading MetricResult for displaying metrics#
Similarly, you can load previously computed metrics by setting metrics_result to None in display_metrics() and providing the same checkpoint manager.
The loaded MetricResult exposes algorithms,
table_metrics, and plot_metrics to discover valid filter values.
from decent_bench import benchmark
from decent_bench.utils.checkpoint_manager import CheckpointManager
if __name__ == "__main__":
checkpoint_manager = CheckpointManager(checkpoint_dir="benchmark_results/my_experiment")
metrics_result = checkpoint_manager.load_metrics_result()
if metrics_result is None:
raise ValueError("No computed metrics found in checkpoint directory")
print("Available algorithms:", metrics_result.algorithms)
print("Available table metrics:", metrics_result.table_metrics)
print("Available plot metrics:", metrics_result.plot_metrics)
benchmark.display_metrics(
metrics_result=metrics_result,
checkpoint_manager=checkpoint_manager,
algorithms=["DGD"],
table_metrics=["nr gradient calls"],
plot_metrics=["regret"],
save_path=checkpoint_manager.get_results_path(),
)
Interoperability requirement#
Decent-Bench is designed to interoperate with multiple array/tensor frameworks (NumPy, PyTorch, JAX, etc.). To keep
algorithms framework-agnostic, always use the interoperability layer interoperability, aliased as
iop, and the Array wrapper when creating, manipulating, and exchanging values:
- Use
decent_bench.utils.interoperability.zerosinstead of framework-specific constructors (e.g., np.zeros, torch.zeros). Other examples are
ones_like(),uniform_like(),normal_like(), etc. Seeinteroperabilityfor a full list of available methods andalgorithmsfor examples of usage.
- Use
- Avoid calling any framework-specific functions directly within your algorithm.
Let the
Costimplementations handle framework-specific details forfunction(),gradient(),hessian(), andproximal().
- When you need to create a new array/tensor, use the interoperability layer to ensure compatibility with the agent’s cost function framework and device.
If a method to create your specific array/tensor is not available, see the implementation of
weightsas en example.
Philosophy#
To keep algorithm definitions consistent and easy to scan, we recommend using the following order for algorithm dataclass fields:
iterations(required)Hyperparameters (step size, penalty, number of local epochs, etc.)
Initialization parameters (e.g.,
x0), with defaultsname
This is a style guideline only; we do not enforce it programmatically.
Algorithms#
Create a new algorithm to benchmark against existing ones.
When implementing a custom algorithm by subclassing P2PAlgorithm, you need to understand the following methods:
- initialize(network): Called once before the algorithm starts. Use this to set up initial values for agents’ primal variables (
Agent.x), auxiliary variables (Agent.aux_vars), and received messages (Agent.messages). Implementation required. If you want the agents’ primal variable to be a customizable parameter to the algorithm, consider using a field like
x0: Array | None = Nonein your algorithm class. Use a helper function likeinitial_states()to initialize it properly if the input argument isNone.initial_states()initializes x0 to zero if x0 is None, otherwise uses provided x0.normal_initialization()can also be used to create normally distributed random initializations, anduniform_initialization()for uniformly distributed;pytorch_initialization()can be used with PyTorchCosts.
- initialize(network): Called once before the algorithm starts. Use this to set up initial values for agents’ primal variables (
step(network, iteration): Called at each iteration of the algorithm. This is where the main algorithm logic goes - updating agent states, computing gradients, exchanging messages, etc. Implementation required.
finalize(network): Called once after all iterations complete. Use this for cleanup operations like clearing auxiliary variables to free memory. Implementation optional - the default implementation clears all auxiliary variables.
run(network): Orchestrates the full algorithm execution by calling
initialize, thenstepfor each iteration, and finally finalize. You should NOT implement this - it is already provided by the baseAlgorithmclass.
Note: In order for metrics to work, use Agent.x to update the local primal
variable once every iteration. If you need to perform multiple updates within an iteration, consider accumulating them and applying a single update at the end of the iteration.
Similarly, in order for the benchmark problem’s communication schemes to be applied, use the
P2PNetwork/ FedNetwork object to retrieve agents and to send and receive messages.
Be sure to use active_agents() during algorithm runtime so that asynchrony is properly handled.
You can also inspect graph to use NetworkX utilities (e.g., plotting or listing edges); mutating this graph changes the network topology.
In FedNetwork, agents() and active_agents() refer to clients (the server is available via server/ coordinator).
Federated networks enforce an always-available server: a custom server passed to FedNetwork must use AlwaysActive, otherwise network construction raises ValueError.
The agents/clients lists are cached for efficiency, so the network graph should be treated as immutable after construction.
Federated aggregation affects only how client updates are combined at the server and does not change the objective
being optimized. If you want to optimize a weighted objective \(\min \sum_i w_i f_i(x)\), scale each local cost by
w_i when defining the problem.
import decent_bench.utils.algorithm_helpers as alg_helpers
import decent_bench.utils.interoperability as iop
from decent_bench import benchmark
from decent_bench.costs import LinearRegressionCost
from decent_bench.distributed_algorithms import ADMM, DGD, P2PAlgorithm
from decent_bench.networks import P2PNetwork
from decent_bench.utils.array import Array
class MyNewAlgorithm(P2PAlgorithm):
iterations: int
step_size: float
x0: Array | None = None
name: str = "MNA"
# Initialize agents with Array values using the interoperability layer
def initialize(self, network: P2PNetwork) -> None: # noqa: D102
self.x0 = alg_helpers.zero_initialization(self.x0, network)
for agent in network.agents():
y0 = iop.zeros(shape=agent.cost.shape, framework=agent.cost.framework, device=agent.cost.device)
neighbors = network.neighbors(agent)
agent.initialize(x=self.x0, received_msgs=dict.fromkeys(neighbors, self.x0), aux_vars={"y": y0})
self.W = network.weights
def step(self, network: P2PNetwork, iteration: int) -> None: # noqa: D102
for i in network.active_agents(iteration):
i.aux_vars["y_new"] = i.x - self.step_size * i.cost.gradient(i.x)
s = iop.stack([self.W[i, j] * x_j for j, x_j in i.messages.items()])
neighborhood_avg = iop.sum(s, dim=0)
neighborhood_avg += self.W[i, i] * i.x
i.x = i.aux_vars["y_new"] - i.aux_vars["y"] + neighborhood_avg
i.aux_vars["y"] = i.aux_vars["y_new"]
for i in network.active_agents(iteration):
network.broadcast(i, i.x)
for i in network.active_agents(iteration):
network.receive_all(i)
def finalize(self, network: P2PNetwork) -> None: # noqa: D102
# Optionally override finalize method. Code below is the default behavior
# which clears auxiliary variables to free memory.
# This function is called after the algorithm completes.
# It is generally not necessary to override this method unless your algorithm
# requires special cleanup or finalization.
for agent in network.agents():
agent.aux_vars.clear()
if __name__ == "__main__":
benchmark.benchmark(
algorithms=[
MyNewAlgorithm(iterations=1000, step_size=0.01),
DGD(iterations=1000, step_size=0.01),
ADMM(iterations=1000, penalty=10, relaxation=0.3),
],
benchmark_problem=benchmark.create_regression_problem(LinearRegressionCost),
)
Metrics#
Table and plot metrics#
Create your own metrics to tabulate and/or plot.
from collections.abc import Sequence
import numpy.linalg as la
import decent_bench.utils.interoperability as iop
from decent_bench.metrics import utils
from decent_bench import benchmark
from decent_bench.agents import AgentMetricsView
from decent_bench.benchmark import BenchmarkProblem
from decent_bench.costs import LinearRegressionCost
from decent_bench.distributed_algorithms import ADMM, DGD
from decent_bench.metrics import Metric
class XError(Metric):
description: str = "x error"
def compute( # noqa: D102
self,
agents: Sequence[AgentMetricsView],
problem: BenchmarkProblem,
iteration: int,
) -> list[float]:
if problem.x_optimal is None:
return [float("nan") for _ in agents]
x_optimal_np = iop.to_numpy(problem.x_optimal)
if iteration == -1:
return [float(la.norm(x_optimal_np - iop.to_numpy(a.x_history[a.x_history.max()]))) for a in agents]
return [
float(la.norm(x_optimal_np - iop.to_numpy(a.x_history[iteration])))
for a in agents
]
if __name__ == "__main__":
x_error = XError(
statistics=[min, max],
fmt=".4e",
x_log=False,
y_log=True,
)
benchmark_result = benchmark.benchmark(
algorithms=[
DGD(iterations=1000, step_size=0.01),
ADMM(iterations=1000, penalty=10, relaxation=0.3),
],
benchmark_problem=benchmark.create_regression_problem(LinearRegressionCost),
)
metrics_result = benchmark.compute_metrics(benchmark_result, table_metrics=[x_error], plot_metrics=[x_error])
benchmark.display_metrics(metrics_result)
Runtime metrics#
Create your own runtime metrics to monitor algorithm progress during execution.
Runtime metrics are computed during algorithm execution to provide live feedback for early stopping or monitoring convergence. Unlike post-hoc table and plot metrics, runtime metrics don’t store historical data and are designed to be lightweight. They are updated at a specified interval and can optionally save plots to disk after execution.
from collections.abc import Sequence
import decent_bench.utils.interoperability as iop
from decent_bench import benchmark
from decent_bench.agents import Agent
from decent_bench.benchmark import BenchmarkProblem
from decent_bench.costs import LinearRegressionCost
from decent_bench.distributed_algorithms import DGD
from decent_bench.metrics import RuntimeMetric
class RuntimeConsensusError(RuntimeMetric):
"""Monitors how well agents agree on their decision variables."""
description = "Consensus Error"
x_log = False
y_log = True
def compute(self, problem: BenchmarkProblem, agents: Sequence[Agent], iteration: int) -> float:
# Compute average x across all agents
x_avg = iop.mean(iop.stack([agent.x for agent in agents]), dim=0)
# Compute average distance from the mean
errors = [float(iop.norm(agent.x - x_avg)) for agent in agents]
return sum(errors) / len(agents)
class RuntimeRegret(RuntimeMetric):
"""Example how to cache computations"""
description = "Regret"
x_log = False
y_log = False
def compute(self, problem: BenchmarkProblem, agents: Sequence[Agent], iteration: int) -> float:
if problem.x_optimal is None:
return float("nan")
agent_cost = sum(agent.cost.function(agent.x) for agent in agents) / len(agents)
if hasattr(self, "_cached_optimal_cost"):
return agent_cost - self._cached_optimal_cost
# Since x_optimal is fixed for the problem, we can cache the optimal cost after computing it once
self._cached_optimal_cost: float = sum(agent.cost.function(problem.x_optimal) for agent in agents) / len(agents)
return agent_cost - self._cached_optimal_cost
if __name__ == "__main__":
benchmark_result = benchmark.benchmark(
algorithms=[DGD(iterations=10000, step_size=0.001)],
benchmark_problem=benchmark.create_regression_problem(LinearRegressionCost),
runtime_metrics=[
RuntimeConsensusError(
update_interval=100, # Compute and plot every 100 iterations
save_path="results", # Save plots to "results" directory during execution
)
],
)
Important considerations for runtime metrics:
Keep the
compute()method efficient, as it’s called during algorithm executionAvoid expensive computations that might significantly slow down the algorithm
The
update_intervalparameter controls the trade-off between monitoring granularity and performance overheadIf
save_pathis provided, plots are saved to disk at each update intervalRuntime metrics are useful for early stopping, detecting divergence, or monitoring specific convergence properties
Cost Functions#
Create new cost functions by subclassing Cost and using interoperability decorators to keep
your implementation framework-agnostic. The decorators automatically wrap inputs/outputs as Array and ensure
compatibility with the selected framework and device of your custom cost.
Composition preserves specialized structure when possible, and otherwise falls back to generic wrappers.
Basic Operations#
Supported operations for cost objects:
Addition:
cost_a + cost_bSubtraction:
cost_a - cost_bNegation:
-costScalar multiplication:
scalar * costorcost * scalarScalar division:
cost / scalarSummation:
sum(costs)(uses__radd__)
Composition Rules#
Cost arithmetic preserves specialized structure for the most common composition patterns and falls back to generic
wrappers otherwise. When a composition falls back to SumCost or
ScaledCost, the result only guarantees the base Cost
interface.
regularizer_a + regularizer_b,regularizer_a - regularizer_b,scalar * regularizer,regularizer / scalar, and-regularizerpreserve a regularizer-aware cost.scalar * empirical_costpreserves the empirical-risk interface through an internal empirical scaling wrapper.empirical_cost + regularizerandempirical_cost - regularizerpreserve the empirical-risk interface throughEmpiricalRegularizedCost.Unsupported combinations still fall back to the generic wrappers
SumCostandScaledCost.
Regularization#
Regularized objectives can be built by composing cost functions with arithmetic. Decent-Bench provides the following built-in regularizers:
The canonical regularization pattern is objective = cost + lambda_ * regularizer.
L1RegularizerCostfor \(\|x\|_1\)L2RegularizerCostfor \(\frac{1}{2}\|x\|_2^2\)FractionalQuadraticRegularizerCostfor \(\sum_i \frac{x_i^2}{1 + x_i^2}\) (nonconvex)
All built-in regularizers accept and ignore empirical-risk-specific kwargs (for example indices="batch"), so
batching continues to work when you compose them with empirical risk costs.
Empirical Risk Composition#
Supported empirical-risk compositions preserve empirical-risk-specific behavior such as predict, dataset,
n_samples, batch_size, and batch helpers.
In particular, objective = cost + regularizer returns an
EmpiricalRegularizedCost, which combines the empirical and regularizer contributions in
function, gradient, and hessian while preserving the empirical interface of the base loss.
When using PyTorchCost, prefer PyTorch’s built-in loss regularizers for better
efficiency; iop regularizers remain available for cross-framework compatibility.
Examples#
from decent_bench.costs import (
LogisticRegressionCost,
L1RegularizerCost,
L2RegularizerCost,
FractionalQuadraticRegularizerCost,
)
cost = LogisticRegressionCost(dataset=dataset, batch_size="all")
lam = 0.1
eps = 0.01
l1 = lam * L1RegularizerCost(shape=cost.shape)
l2 = lam * L2RegularizerCost(shape=cost.shape)
fq = eps * FractionalQuadraticRegularizerCost(shape=cost.shape)
regularizer = l1 + l2
objective = cost + regularizer
nonconvex_objective = objective + fq
lambda_ = 0.05
objective = cost + lambda_ * L2RegularizerCost(shape=cost.shape)
value = objective.function(x, indices="all")
gradient = objective.gradient(x, indices="all")
import numpy as np
from decent_bench.costs import QuadraticCost
arbitrary = QuadraticCost(np.eye(cost.shape[0]), np.zeros(cost.shape[0]))
generic = objective + arbitrary # returns SumCost
Important Semantics#
Reduction Semantics#
gradient uses broadcast semantics when reduction=None: the
empirical term returns one gradient per selected sample, and the regularizer gradient is added to each row. Averaging
over the sample dimension recovers the same composite gradient returned by reduction="mean".
Proximal Semantics#
Warning
Proximal support is intentionally conservative. Positive scalar scaling preserves proximal support, and a single
positively scaled regularizer term preserves the underlying regularizer proximal. Multi-term regularizer
composites and EmpiricalRegularizedCost do not define a generic proximal. Use a
specialized proximal if one exists, or rely on decent_bench.centralized_algorithms.proximal_solver() when
its assumptions are satisfied.
Warning
proximal computes the proximal of the full summed objective through
decent_bench.centralized_algorithms.proximal_solver(), which uses accelerated gradient descent. This
requires the summed objective to satisfy that backend’s assumptions, in particular differentiability, global
smoothness, and convexity.
Copy Semantics#
Warning
Composition wrappers keep references to the underlying cost objects; they do not make implicit copies. Mutating a
reused cost after composition therefore affects all wrappers that reference it. Agent-installed call-counting
hooks on reused cost objects are also shared. Use copy.deepcopy when independent composed objects or
independent counting behavior are required.
import copy
shared = cost + cost
independent = copy.deepcopy(shared)
Custom Cost Example#
from numpy import float64
from numpy.typing import NDArray
import decent_bench.utils.interoperability as iop
from decent_bench.costs import Cost
from decent_bench.utils.types import SupportedFrameworks, SupportedDevices
class MyCost(Cost):
def __init__(self, A: Array, b: Array):
# Convert any external arrays to Array using the chosen framework/device
self.A: NDArray[float64] = iop.to_numpy(A)
self.b: NDArray[float64] = iop.to_numpy(b)
@property
def shape(self) -> tuple[int, ...]:
# Domain shape (e.g., dimension of x)
return (self.A.shape[1],)
@property
def framework(self) -> str:
return SupportedFrameworks.NUMPY
@property
def device(self) -> str | None:
return SupportedDevices.CPU
@property
def m_smooth(self) -> float:
# Provide a meaningful smoothness constant if available
return 1.0
@property
def m_cvx(self) -> float:
# Provide convexity constant (0 if non-strongly convex)
return 0.0
@iop.autodecorate_cost_method(Cost.function)
def function(self, x: NDArray[float64]) -> float:
# Return a scalar (float) or Array scalar compatible with the framework
r = self.A @ x - self.b
return 0.5 * float(iop.dot(r, r))
@iop.autodecorate_cost_method(Cost.gradient)
def gradient(self, x: NDArray[float64]) -> NDArray[float64]:
# Return an Array with same shape as x
return self.A.T @ (self.A @ x - self.b)
@iop.autodecorate_cost_method(Cost.hessian)
def hessian(self, x: NDArray[float64]) -> NDArray[float64]:
# Optional: return an Array representing the Hessian
return self.A.T @ self.A
@iop.autodecorate_cost_method(Cost.proximal)
def proximal(self, x: NDArray[float64], rho: float) -> NDArray[float64]:
# Optional: provide a closed-form proximal if available
# Otherwise you can rely on `centralized_algorithms.proximal_solver`.
return x # identity as a placeholder
# No __add__ implementation is required unless you want to preserve
# a more specialized structure than the generic Cost fallback.